 购物车
购物车 商品分类
商品分类
关于西门子伺服电机驱动优化的三个问题(二)
6424浏览量
0评论
1.2速度环比和积分对负荷的影响?
问题2
如果将一方的负载吊在电机轴的侧面,不进行闭环控制,负载会受到重力的影响直接落下。 此时,速度闭环被激活,但如果只启用比例控制,会发生什么现象呢? 如果只有积分有效,会发生什么现象?
相关信息
速度控制器是PI控制器。 比例对应于与设定值相关的电机阻尼,积分器的积分时间就像弹簧一样。
可以通过以下两种方法优化节流阀。
干涉最佳
高控制器增益。 电机跟踪设定值非常有效。 虽然电机侧的干扰可以得到最佳补偿,但存在负载连接刚性不足时容易振动的缺点。
连接刚性不足时,电动机侧的编码器会“看不见”负载侧发生的情况。
阻尼最合适
控制器被故意设置为弱,以使控制器充当“弹簧”而不是电机。 是负载耦合振荡。
但是,由于控制器未完全抑制电机侧的干扰(例如齿轮),因此可能会产生负面影响,从而影响负载侧。
优化通常分两个阶段进行。
(1)比例增益最佳化(Kp)
(2)积分时间的优化(Tn)。
为了优化速度控制器增益,需要将PI控制器的积分部分设为无效。
设定Tn=0,或设定1000ms等较长的积分时间。 速度控制器增益Kp优化后,进行积分时间的优化。
典型的目标是将比例增益系数设定得足够高,以保持控制环的稳定性,同时获得机械的动态要求。
简单地回答
如果只有控制器的p部分有效,负荷会持续下降,但就像粘性液体一样,下降后会产生阻尼效果,Kp越大阻尼效果越大。
只有积分部分,负荷只能下降到停止前的某个角度。 可以想象弹簧被压缩,负荷减速下降(弹簧力=重量的转矩时静止)。 积分时间越短,负荷停止得越快。 去除负荷后,电机“反弹”到初始位置。
1.3
转动惯量比是多少?
问题3
外部负载转动惯量与电机转动惯量的比应该是多少?
相关信息
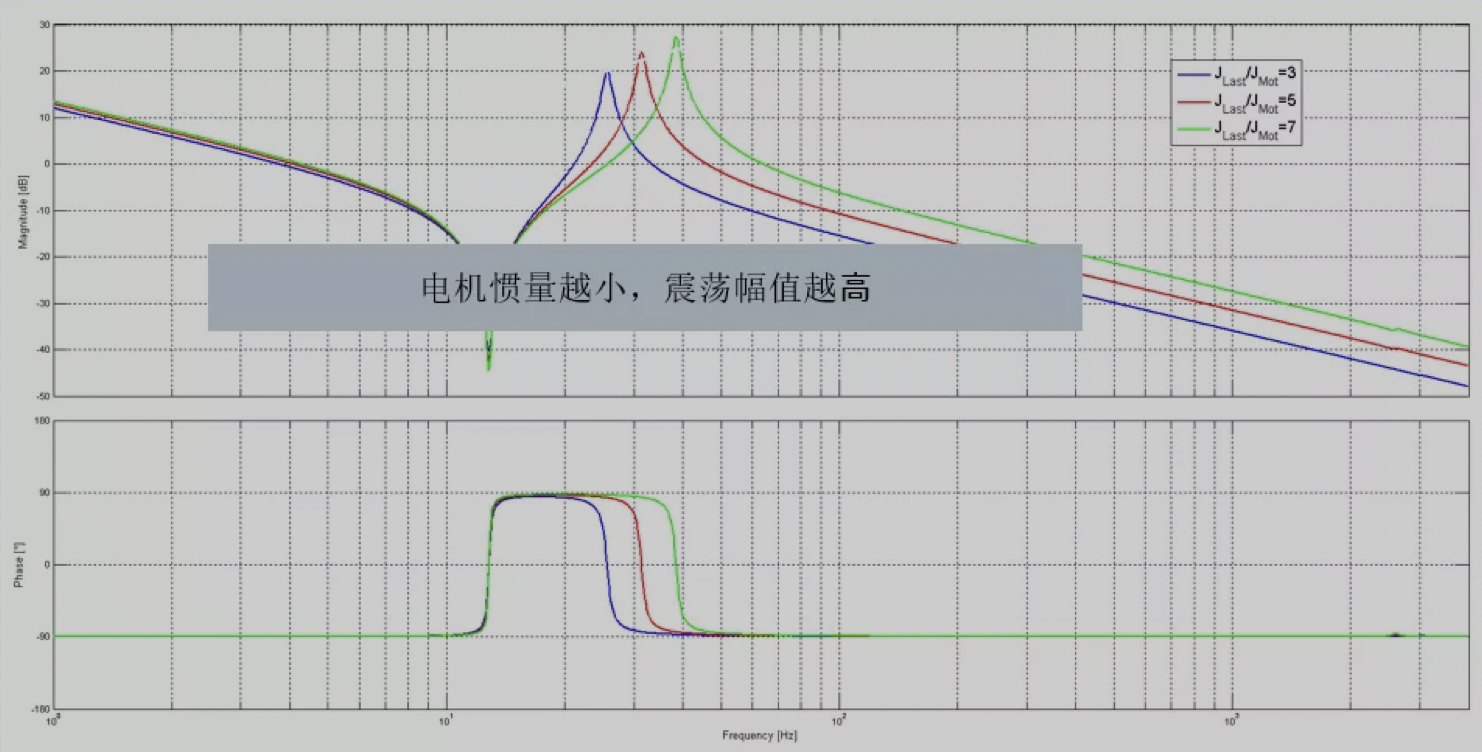
转动惯量比是评价系统动态特性的指标。
1 .电机转动惯量越小,对于相同的负载,在频率范围内观察时振动的振幅越增加。
2 .电机的转动惯量越小,对于相同的负载,在时域上观察时,超调越严重。
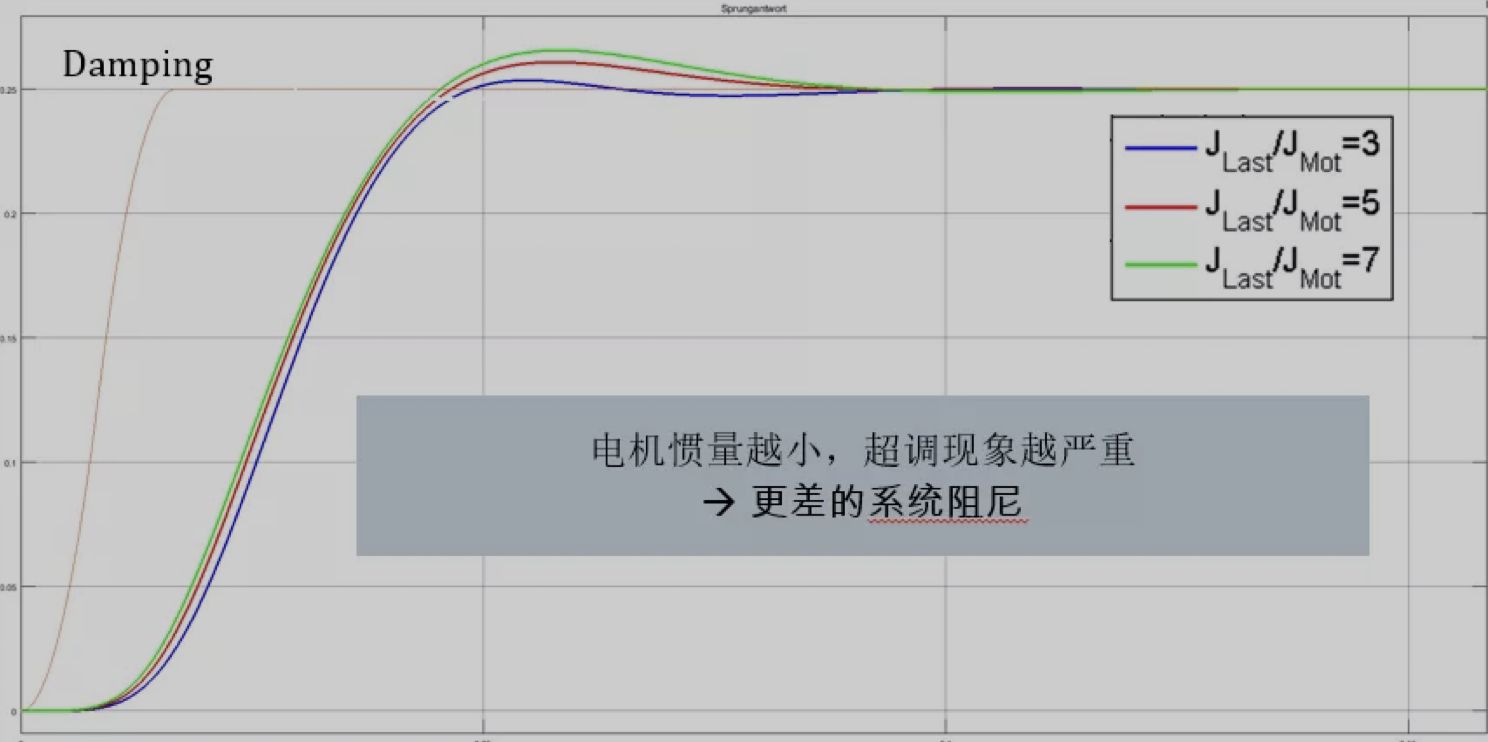
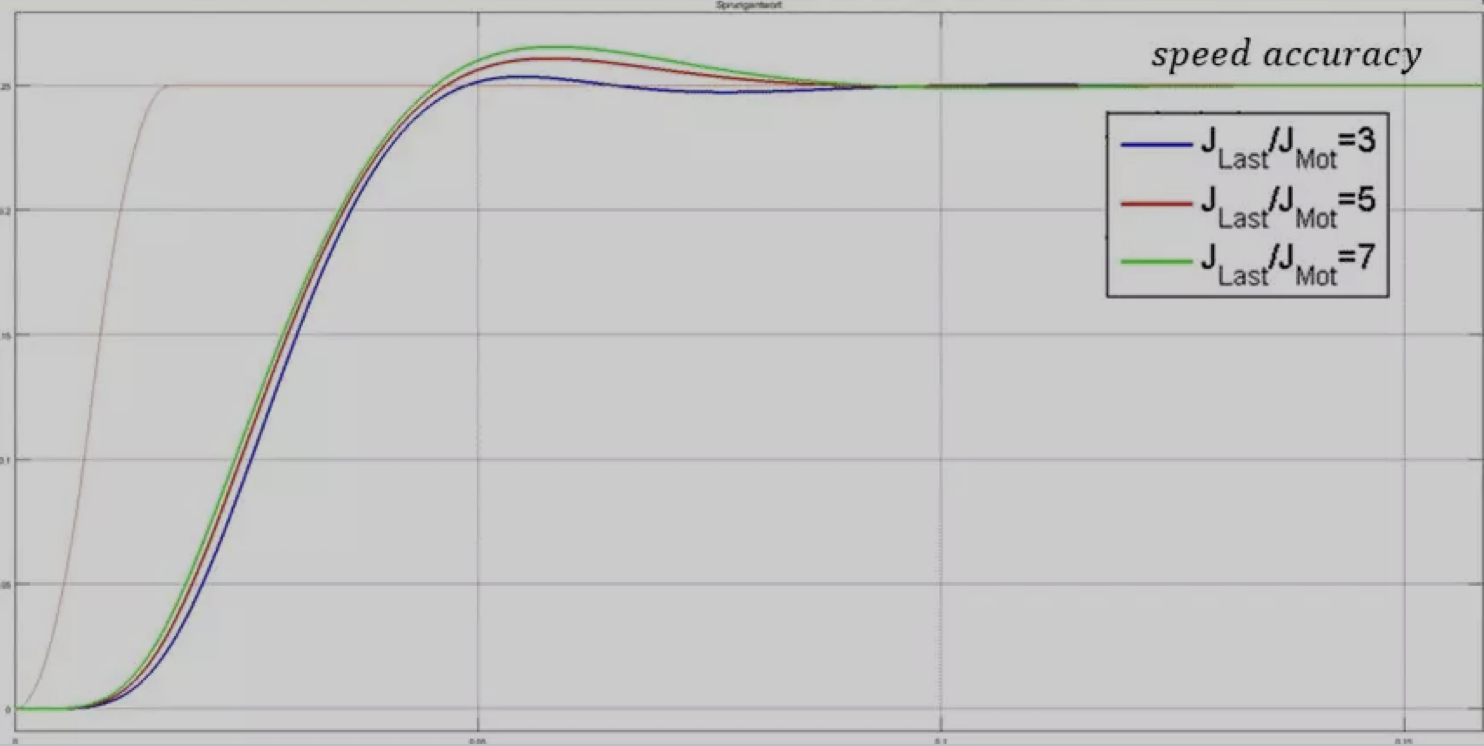
3 .电机无论转动惯量大小,在动态调整过程完成后,设定值与实际值都有一致的趋势。
简单地回答
很难概括转动惯量比的一般有效转动惯量比的数值。 因电机连接刚性(转子和机械轴)和必要的负载周期(加速/减速)而异,因此需要按特定的应用情况评价转动惯量比。
(1)适用于机床加工设备的比为约3。
(2)生产机械领域的限制往往可以增加。
(3)特别是在纯粹的速度控制轴上,可以进一步提高比率。 根据所需的负载周期,惯量比为50:1,在动态需求较低的应用环境中也可以为2000:1。
- ·ET200SP HA分布式IO系统以及IO模块组态(一) 33319
- ·ET200SP HA分布式IO系统以及IO模块组态(二) 9968
- ·西门子S7-200SMART PLC系列通讯模块-EM DP01 9896
- ·西门子触摸屏与以太网接口的通信 9858
- ·西门子1200(S7-1200)运动控制早知道(三) 8177
- ·西门子1200(S7-1200 )运动控制早知道(一) 8104
- ·关于西门子伺服电机驱动优化的三个问答(一) 8030
- ·关于西门子伺服电机驱动优化的三个问题(二) 6424
- · Smart plc(S7-200 SMART)11个实用编程技巧 2981
- ·西门子1500(S7-1500)数据块的在线操作 1175
 方经理:15320149668
方经理:15320149668 天津市西青区新技术产业园榕苑路15号鑫茂军民园
天津市西青区新技术产业园榕苑路15号鑫茂军民园
评论区
+ 写评论