 购物车
购物车 商品分类
商品分类
关于西门子伺服电机驱动优化的三个问答(一)
8030浏览量
0评论
1 .概要
在控制理论的专业学习中,很少侧重于工业现场的基础常见问题,过于专注先进控制理论的数学推导和研究,而忽视了现场常用的传统控制方法和基本调试程序。 现场调试的工程师经常放弃对理论的理解和掌握,放弃对系统的分析,依靠自己的经验,用试错的方法进行调试。
本文结合理论知识和实际应用场景,给大家列举了调试中的常见问题,有助于伺服工程师观察和理解现场的实际现象,快速优化伺服控制器。
1.1
比例大还是小?
问题1
使用一个西门子私服电机a,无负载时,将比例增益参数设定为0.3。 具有一定的弹性机构将负载连接到该电机上,负载和电机的总惯性量比空电机大时,比例参数0.3是过大还是过小?
相关信息
用电机驱动的机械系统可以用所谓的双质点系统简化描述。
这两个载荷之间的连接(连接)由刚度(c)和阻尼(d)描述。
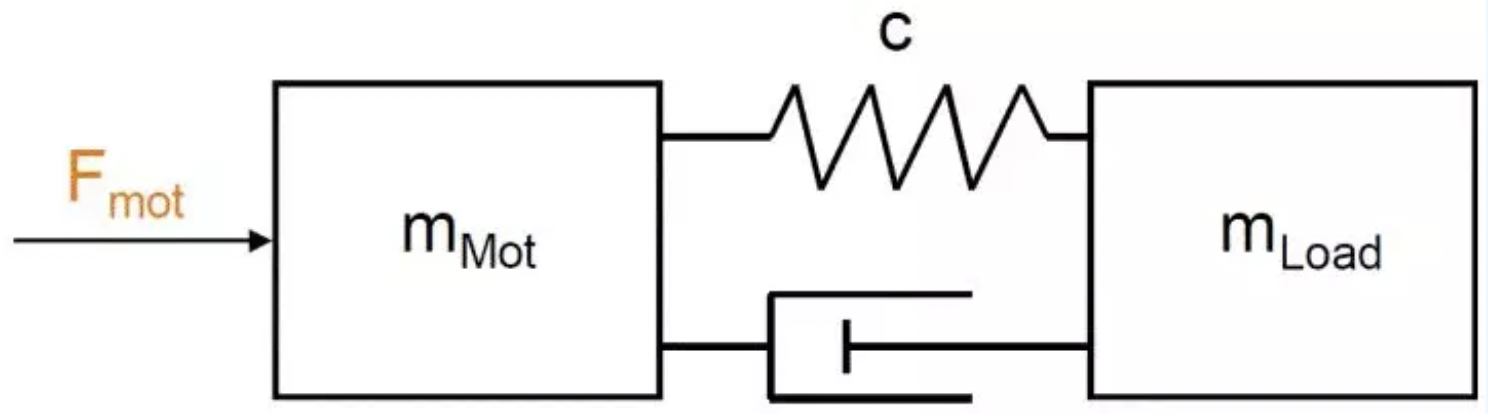
图一 双质点系统
在频域中,系统具有以下频率响应。
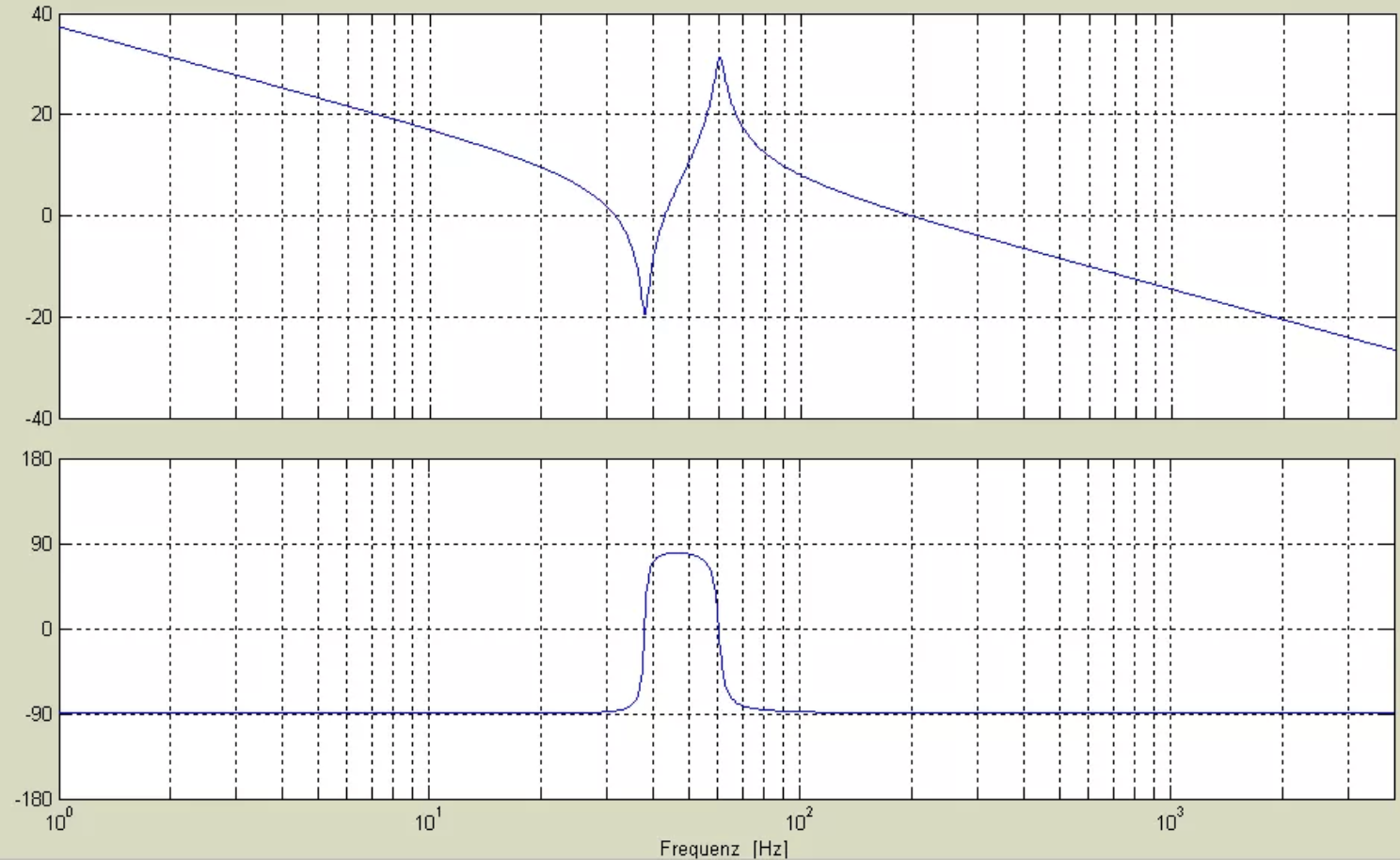
图二 速度控制系统频率响应
两个不同的频率可以观测耦合到电机的负载。
零点
极点
过零点频率后,相关负载与电机/系统解耦。 这意味着控制系统不能以高于零点的频率驱动负载,从而切断了从电机到负载的能量传输。 低线与高线相比,低水平意味着转动惯量大。
在理想的双质点系统的情况下,系统的总惯性量可以从锁定转子频率(零点)的左侧读取。 在共振频率的右侧,由于负载惯性已经断开,因此在控制系统中只能看到电动机惯性。
零点表示该频率存在比当前负载更多的惯量。 负载的移动非常消耗能量。 消除马达的动作。
相反,极点在系统中似乎有非常小的惯性矩。 在这种情况下,电机不需要花太多的能量来驱动负载。 负载是“推动”电机。
简单地回答
通常认为速度环的比例系统与转动惯量的大小成正比,但由于弹性和双质点系统的存在,系统在特定的频率下变得不稳定。
由于联轴器的弹性,在产生共振频率的情况下,电机面临的转动惯量远远小于电机自身的转动惯量。 这种情况下,由于负载“推动”电机,所以对应的Kp太大了。
加载后,机械端可以提高电机和负载的连接刚性,控制端可以通过电流环设定值滤波器消除极点,或者设置合适的Kp来保证系统的稳定。
- ·ET200SP HA分布式IO系统以及IO模块组态(一) 33319
- ·ET200SP HA分布式IO系统以及IO模块组态(二) 9968
- ·西门子S7-200SMART PLC系列通讯模块-EM DP01 9896
- ·西门子触摸屏与以太网接口的通信 9858
- ·西门子1200(S7-1200)运动控制早知道(三) 8177
- ·西门子1200(S7-1200 )运动控制早知道(一) 8104
- ·关于西门子伺服电机驱动优化的三个问答(一) 8030
- ·关于西门子伺服电机驱动优化的三个问题(二) 6425
- · Smart plc(S7-200 SMART)11个实用编程技巧 2981
- ·西门子1500(S7-1500)数据块的在线操作 1175
 方经理:15320149668
方经理:15320149668 天津市西青区新技术产业园榕苑路15号鑫茂军民园
天津市西青区新技术产业园榕苑路15号鑫茂军民园
评论区
+ 写评论